Modulering er en ikke-lineær elektrisk prosess der parametrene til ett signal (bærer) endres ved hjelp av et annet signal (modulering, informasjon). I kommunikasjonsteknologi er frekvens, amplitude og fasemodulasjon mye brukt. Innen kraftelektronikk og mikroprosessorteknologi har pulsbreddemodulasjon blitt utbredt.
Innhold
Hva er PWM (Pulse Width Modulation)
Med pulsbreddemodulasjon av det originale signalet forblir amplituden, frekvensen og fasen til det originale signalet uendret. Varigheten (bredden) til den rektangulære pulsen kan endres under påvirkning av informasjonssignalet. I engelsk faglitteratur er det forkortet som PWM - pulsbreddemodulasjon.
Hvordan PWM fungerer
Det pulsbreddemodulerte signalet dannes på to måter:
- analog;
- digital.
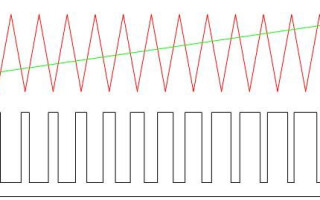
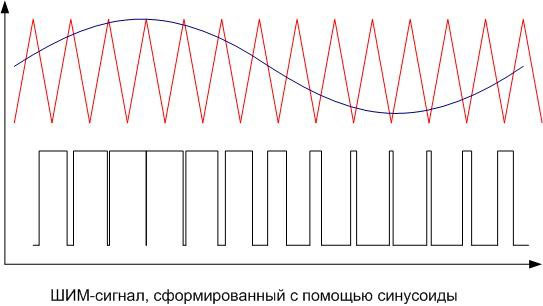
Med den analoge metoden for å lage et PWM-signal, mates en bærer i form av et sagtann eller trekantet signal til en inverterende komparatorinngang, og informasjon - om ikke-invertering. Hvis det øyeblikkelige bærebølgenivået er høyere enn det modulerende signalet, er utgangen fra komparatoren null, hvis lavere - en. Utgangen er et diskret signal med en frekvens som tilsvarer frekvensen til bæretrekanten eller sagen, og en pulslengde proporsjonal med nivået til moduleringsspenningen.
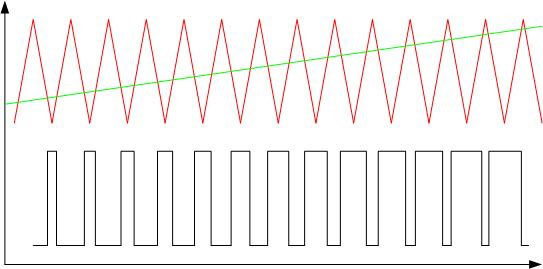
Som et eksempel øker pulsbreddemodulasjonen til et trekantet signal lineært. Varigheten av utgangspulsene er proporsjonal med nivået på utgangssignalet.
Analoge PWM-kontrollere er også tilgjengelige i form av ferdige mikrokretser, inne i hvilke en komparator og en bærergenereringskrets er installert. Det er innganger for tilkobling av eksterne frekvensinnstillingselementer og tilførsel av informasjonssignal. Et signal fjernes fra utgangen som styrer kraftige fremmednøkler. Det er også innganger for tilbakemelding - de er nødvendige for å opprettholde de innstilte kontrollparametrene. Slik er for eksempel TL494-brikken. For tilfeller hvor kraften til forbrukeren er relativt liten, er PWM-kontrollere med innebygde nøkler tilgjengelige. Den interne nøkkelen til LM2596-mikrokretsen er designet for strøm opp til 3 ampere.
Den digitale metoden utføres ved hjelp av spesialiserte mikrokretser eller mikroprosessorer. Pulslengden styres av det interne programmet. Mange mikrokontrollere, inkludert den populære PIC og AVR, har en innebygd modul for maskinvareimplementering av PWM "ombord", for å motta et PWM-signal, må du aktivere modulen og angi driftsparametrene.Hvis en slik modul ikke er tilgjengelig, kan PWM organiseres rent av programvare, dette er ikke vanskelig. Denne metoden gir mer kraft og frihet gjennom fleksibel bruk av utganger, men bruker flere kontrollerressurser.
Egenskaper til PWM-signalet
De viktige egenskapene til PWM-signalet er:
- amplitude (U);
- frekvens (f);
- driftssyklus (S) eller driftssyklus D.
Amplituden i volt settes avhengig av belastningen. Den må gi den nominelle forsyningsspenningen til forbrukeren.
Frekvensen til signalet modulert av pulsbredden er valgt fra følgende betraktninger:
- Jo høyere frekvens, desto høyere kontrollnøyaktighet.
- Frekvensen må ikke være lavere enn responstiden til enheten kontrollert av PWM, ellers vil det oppstå merkbare krusninger av den kontrollerte parameteren.
- Jo høyere frekvensen er, desto høyere koblingstap. Det kommer av det faktum at koblingstiden til nøkkelen er begrenset. I låst tilstand faller all forsyningsspenningen på nøkkelelementet, men det er nesten ingen strøm. I åpen tilstand flyter fulllaststrømmen gjennom nøkkelen, men spenningsfallet er lite, siden gjennomstrømningsmotstanden er noen få ohm. I begge tilfeller er krafttapet ubetydelig. Overgangen fra en tilstand til en annen skjer raskt, men ikke umiddelbart. I prosessen med å låse opp, faller en stor spenning på et delvis åpent element og samtidig flyter en betydelig strøm gjennom det. På dette tidspunktet når den tapte kraften høye verdier. Denne perioden er kort, nøkkelen har ikke tid til å varme opp betydelig.Men med en økning i frekvensen av slike tidsintervaller per tidsenhet, blir det mer, og varmetapene øker. Derfor, for å bygge nøkler, er det viktig å bruke raske elementer.
- Ved kjøring elektrisk motor frekvensen må fjernes fra området som er hørbart for en person - 25 kHz og over. For ved en lavere PWM-frekvens oppstår det en ubehagelig fløyte.
Disse kravene er ofte i konflikt med hverandre, så valg av frekvens er i noen tilfeller et kompromiss.
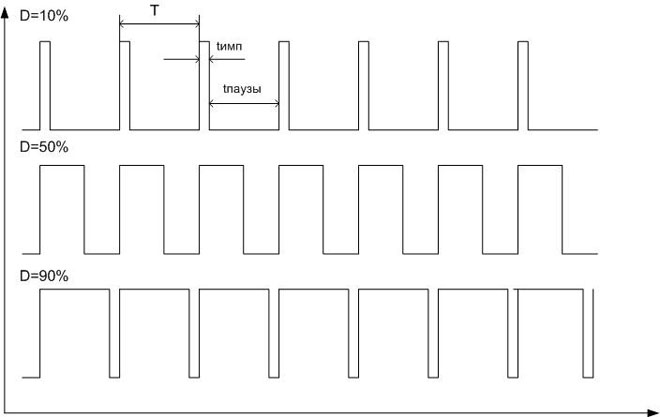
Modulasjonsverdien karakteriserer driftssyklusen. Siden pulsrepetisjonshastigheten er konstant, er varigheten av perioden også konstant (T=1/f). Perioden består av en impuls og en pause, som har en varighet på henholdsvis timp og Tpauser, og Timp+tpauser=T. Driftssyklusen er forholdet mellom pulsvarigheten og perioden - S \u003d timp/T. Men i praksis viste det seg å være mer praktisk å bruke den gjensidige verdien - fyllfaktoren: D=1/S=T/timp. Det er enda mer praktisk å uttrykke fyllfaktoren i prosent.
Hva er forskjellen mellom PWM og SIR
I utenlandsk faglitteratur er det ingen forskjell mellom pulsbreddemodulasjon og pulsbredderegulering (PWR). Russiske spesialister prøver å skille mellom disse konseptene. Faktisk er PWM en type modulasjon, det vil si endringer i bæresignalet under påvirkning av en annen, modulerende en. Bæresignalet fungerer som en informasjonsbærer, og det modulerende signalet setter denne informasjonen. Og pulsbredderegulering er reguleringen av belastningsmodusen ved hjelp av PWM.
Årsaker og anvendelser av PWM
Prinsippet for pulsbreddemodulasjon brukes i hastighetsregulatorer av kraftige asynkronmotorer. I dette tilfellet genereres det justerbare frekvensmodulerende signalet (enfaset eller trefaset) av en laveffekts sinusbølgegenerator og overlagres på bærebølgen på en analog måte. Utgangen er et PWM-signal, som mates til tastene til den nødvendige kraften. Deretter kan du sende den resulterende sekvensen av pulser gjennom et lavpassfilter, for eksempel gjennom en enkel RC-krets, og velge den originale sinusoiden. Eller du kan klare deg uten det - filtrering vil skje naturlig på grunn av motorens treghet. Jo høyere bærefrekvensen er, jo mer er utgangsbølgeformen nær den opprinnelige sinusformen.
Et naturlig spørsmål oppstår - hvorfor det er umulig å forsterke signalet til generatoren umiddelbart, for eksempel, ved hjelp av kraftige transistorer? Fordi et reguleringselement som opererer i en lineær modus vil omfordele kraften mellom lasten og nøkkelen. I dette tilfellet er betydelig kraft bortkastet på nøkkelelementet. Hvis et kraftig kontrollelement fungerer i en nøkkelmodus (trinistor, triac, RGBT-transistor), fordeles kraften over tid. Tapene vil være mye lavere, og effektiviteten vil være mye høyere.
I digital teknologi er det ikke noe spesielt alternativ til pulsbredderegulering. Signalamplituden er konstant der, spenningen og strømmen kan bare endres ved å modulere bærebølgen langs pulsbredden og deretter beregne gjennomsnittet. Derfor brukes PWM til å regulere spenning og strøm på de objektene som kan midlere pulssignalet. Gjennomsnittet skjer på forskjellige måter:
- på grunn av belastningstreghet.Dermed lar den termiske tregheten til termoelektriske varmeovner og glødelamper de regulerte objektene ikke merkbart avkjøles i pausene mellom pulsene.
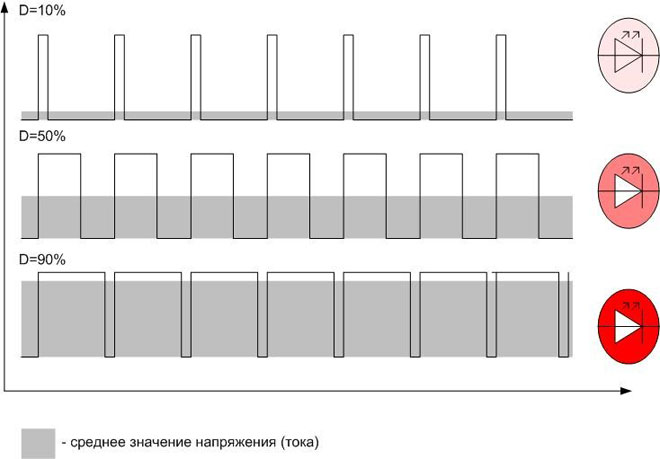
- På grunn av treghet i persepsjonen. LED-en har tid til å gå ut fra puls til puls, men det menneskelige øyet merker ikke dette og oppfatter det som en konstant glød med varierende intensitet. Dette prinsippet brukes til å kontrollere lysstyrken til prikker på LED-skjermer. Men umerkelig blinking med en frekvens på flere hundre hertz er fortsatt tilstede og forårsaker tretthet i øynene.
- på grunn av mekanisk treghet. Denne egenskapen brukes til styring av børstede likestrømsmotorer. Med en riktig valgt reguleringsfrekvens rekker ikke motoren å bremse i døde pauser.
Derfor brukes PWM der gjennomsnittsverdien av spenning eller strøm spiller en avgjørende rolle. I tillegg til de vanlige tilfellene som er nevnt, regulerer PWM-metoden gjennomsnittsstrømmen i sveisemaskiner og batteriladere mv.
Hvis naturlig gjennomsnitt ikke er mulig, kan denne rollen i mange tilfeller overtas av det allerede nevnte lavpassfilteret (LPF) i form av en RC-kjede. For praktiske formål er dette nok, men det må forstås at det er umulig å isolere det originale signalet fra PWM ved hjelp av et lavpassfilter uten forvrengning. Tross alt inneholder PWM-spekteret et uendelig antall harmoniske som uunngåelig vil falle inn i filterets passbånd. Derfor bør man ikke bygge illusjoner om formen på den rekonstruerte sinusoiden.
Meget effektiv og effektiv PWM RGB LED-kontroll. Denne enheten har tre p-n-kryss - rød, blå, grønn.Ved å endre lysstyrken på gløden til hver kanal separat, kan du få nesten hvilken som helst farge på LED-gløden (med unntak av rent hvitt). Mulighetene for å lage lyseffekter med PWM er uendelige.
Den vanligste bruken av et pulsbreddemodulert digitalt signal er å kontrollere den gjennomsnittlige strømmen eller spenningen som strømmer gjennom en last. Men ikke-standard bruk av denne typen modulasjon er også mulig. Alt avhenger av utviklerens fantasi.
Lignende artikler: