En sensor i generell forstand er en enhet som konverterer en fysisk mengde til en annen, praktisk for prosessering, overføring eller etterfølgende konvertering. Som regel er den første størrelsen fysisk, ikke tilgjengelig for direkte måling (temperatur, hastighet, forskyvning, etc.), og den andre er et elektrisk eller optisk signal. En nisje innen måleinstrumenter er okkupert av sensorer, hvis hovedelement er en induktor.
Innhold
Hvordan induktanssensoren fungerer og hvordan den fungerer
I henhold til operasjonsprinsippet er induktive sensorer aktive, det vil si at de krever en ekstern generator for å fungere. Den gir et signal med en gitt frekvens og amplitude til induktoren.
Strømmen som går gjennom spolens svinger skaper et magnetfelt. Hvis en ledende gjenstand kommer inn i magnetfeltet, endres parametrene til spolen.Det gjenstår bare å fikse denne endringen.
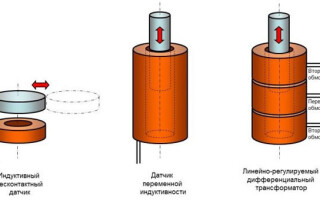
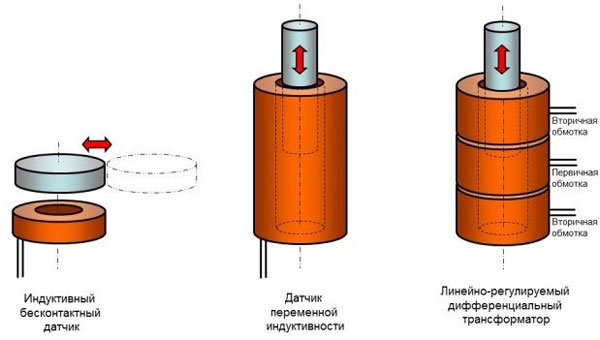
Enkle berøringsfrie sensorer reagerer på utseendet til metallgjenstander i nærsonen av viklingen. Dette endrer impedansen til spolen, denne endringen må konverteres til et elektrisk signal, forsterke og (eller) fikse passeringen av terskelen ved hjelp av en sammenligningskrets.
Sensorer av en annen type reagerer på endringer i lengdeposisjonen til objektet som fungerer som spolens kjerne. Når posisjonen til objektet endres, beveger det seg inn eller ut av spolen, og endrer dermed induktansen. Denne endringen kan konverteres til et elektrisk signal og måles. En annen versjon av en slik sensor er når et objekt nærmer seg spolen fra utsiden. Dette fører til at induktansen reduseres på grunn av jordeffekten.
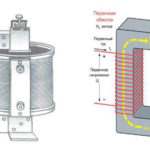
En annen versjon av den induktive forskyvningssensoren er en lineært justerbar differensialtransformator (LVDT). Det er en komposittspole, laget i følgende rekkefølge:
- sekundærvikling 1;
- primær vikling;
- sekundærvikling 2.
Signalet fra generatoren mates til primærviklingen. Magnetfeltet skapt av midtspolen induserer en EMF i hver av de sekundære (transformatorprinsipp). Kjernen, når den beveger seg, endrer den gjensidige forbindelsen mellom spolene, og endrer den elektromotoriske kraften i hver av viklingene. Denne endringen kan fikses av målekretsen. Siden lengden på kjernen er mindre enn den totale lengden av komposittspolen, kan posisjonen til objektet entydig bestemmes av EMF-forholdet i sekundærviklingene.
På samme prinsipp - en endring i den induktive koblingen mellom viklingene - bygges en svingsensor.Den består av to koaksiale spoler. Signalet påføres en av viklingene, EMF i den andre avhenger av den gjensidige rotasjonsvinkelen.
Fra operasjonsprinsippet er det åpenbart at induktive sensorer, uavhengig av design, er berøringsfrie. De jobber på avstand, og krever ikke direkte kontakt med det kontrollerte objektet.
Fordeler og ulemper med induktive sensorer
Fordelene med induktive sensorer inkluderer først og fremst:
- design pålitelighet;
- mangel på kontaktforbindelser;
- høy utgangseffekt, som reduserer påvirkningen av støy og forenkler kontrollkretsen;
- høy følsomhet;
- evnen til å arbeide fra kilder til vekselspenning av industriell frekvens.
Den største ulempen med induktive sensorer er deres størrelse, vekt og produksjonskompleksitet. For viklingsspoler med de gitte parameterne kreves spesialutstyr. Også behovet for å opprettholde amplituden til signalet fra masteroscillatoren regnes som et minus. Når det endres, endres også følsomhetsområdet. Siden sensorene kun opererer på vekselstrøm, blir det et visst teknisk problem å opprettholde amplituden. Direkte (eller gjennom en nedtrappingstransformator) vil det ikke være mulig å koble sensoren til et husholdnings- eller industrinettverk - i den kan spenningssvingninger i amplitude eller frekvens til og med nå 10 % i normal modus, noe som gjør målenøyaktigheten uakseptabel .
Målenøyaktigheten kan også påvirkes av:
- tredjeparts magnetiske felt (skjerming av sensoren er umulig basert på prinsippet om dens drift);
- tredjeparts EMF pickuper i forsynings- og målekabler;
- produksjonsfeil;
- sensorkarakteristisk feil;
- tilbakeslag eller deformasjoner på sensorinstallasjonsstedet som ikke påvirker den generelle ytelsen;
- avhengighet av nøyaktighet på temperatur (parametrene til viklingstråden endres, inkludert motstanden).
Induktanssensorers manglende evne til å reagere på utseendet til dielektriske objekter i deres magnetiske felt kan tilskrives både fordeler og ulemper. På den ene siden begrenser dette omfanget av deres anvendelse. På den annen side gjør den den ufølsom for tilstedeværelsen av smuss, fett, sand osv. på de overvåkede objektene.
Kunnskap om manglene og mulige begrensninger i driften av induktive sensorer tillater rasjonell bruk av deres fordeler.
Omfang av induktive sensorer
Induktive nærhetssensorer brukes ofte som grensebrytere. Slike enheter har blitt utbredt:
- i sikkerhetssystemer, som sensorer for uautorisert åpning av vinduer og dører;
- i telemekanikksystemer, som sensorer for den endelige posisjonen til enheter og mekanismer;
- i hverdagen i ordningene for å indikere den lukkede posisjonen til dører, skodder;
- for telling av gjenstander (for eksempel å bevege seg langs transportbåndet);
- for å bestemme rotasjonshastigheten til girene (hver tann, som passerer sensoren, skaper en impuls);
- i andre situasjoner.

Vinkelkodere kan brukes til å bestemme rotasjonsvinklene til aksler, gir og andre roterende komponenter, så vel som absolutte enkodere. Slike enheter kan også brukes i maskinverktøy og robotenheter sammen med lineære posisjonssensorer. Hvor du trenger å vite nøyaktig plasseringen av nodene til mekanismene.
Praktiske eksempler på implementering av induktive sensorer
I praksis kan design av induktive sensorer implementeres på forskjellige måter. Den enkleste utførelsen og inkluderingen er for en to-tråds enkeltsensor, som overvåker tilstedeværelsen av metallgjenstander i sin følsomhetssone. Slike enheter er ofte laget på grunnlag av en E-formet kjerne, men dette er ikke et grunnleggende poeng. En slik implementering er lettere å produsere.
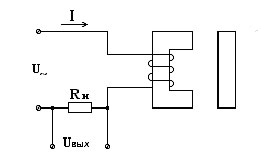
Når spolemotstanden endres, endres strømmen i kretsen og spenningsfallet over lasten. Disse endringene kan forpliktes. Problemet er at belastningsmotstanden blir kritisk. Hvis den er for stor, vil endringene i strøm når en metallgjenstand dukker opp være relativt små. Dette reduserer systemets følsomhet og støyimmunitet. Hvis den er liten, vil strømmen i kretsen være stor, en mer motstandsdyktig sensor vil være nødvendig.
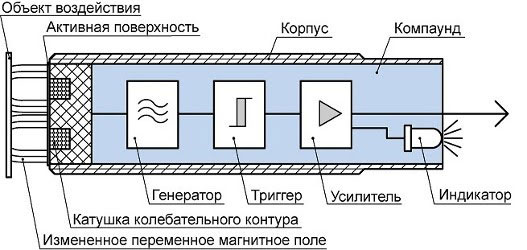
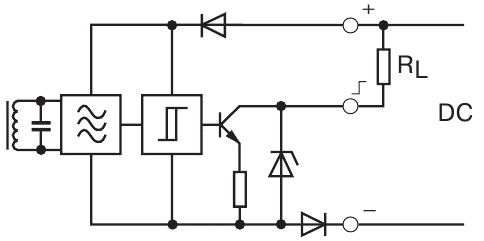
Derfor er det design der målekretsen er innebygd i sensorhuset. Generatoren genererer pulser som mater induktoren. Når et visst nivå er nådd, utløses utløseren og går fra tilstand 0 til 1 eller omvendt. Bufferforsterkeren forsterker signalet når det gjelder kraft og (eller) spenning, tenner (slukker) LED-en og sender ut et diskret signal til den eksterne kretsen.
Utgangssignalet kan dannes:
- ved elektromagnetisk eller solid state relé – null eller ett spenningsnivå;
- "tørr kontakt" elektromagnetisk relé;
- åpen samler transistor (strukturer n-p-n eller p-n-p).
I dette tilfellet kreves det tre ledninger for å koble til sensoren:
- mat;
- felles ledning (0 volt);
- signal ledning.
Slike sensorer kan også drives av likespenning. Pulser til induktansen de dannes ved hjelp av en intern generator.
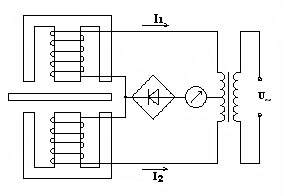
Differensialgivere brukes til posisjonsovervåking. Hvis det kontrollerte objektet er symmetrisk med hensyn til begge spolene, er strømmen gjennom dem den samme. Når en vikling forskyves mot feltet, oppstår det en ubalanse, den totale strømmen slutter å være lik null, noe som kan registreres av en indikator med en pil i midten av skalaen. Indikatoren kan brukes til å bestemme både størrelsen på skiftet og retningen. I stedet for en pekerenhet kan du bruke et kontrollskjema som, etter å ha mottatt informasjon om en endring i posisjon, vil gi et signal, iverksette tiltak for å justere objektet, foreta justeringer av den teknologiske prosessen, etc.

Sensorer laget i henhold til prinsippet om lineært justerbare differensialtransformatorer produseres i form av komplette strukturer, som er en ramme med primære og sekundære viklinger og en stang som beveger seg innvendig (den kan være fjærbelastet). Ledninger tas ut for å sende et signal fra generatoren og fjerne EMF fra sekundærviklingene. En kontrollert gjenstand kan festes mekanisk til stangen. Den kan også være laget av et dielektrikum - bare posisjonen til stammen betyr noe for måling.
Til tross for visse iboende mangler, lukker den induktive sensoren mange områder forbundet med berøringsfri deteksjon av objekter i rommet.Til tross for den konstante utviklingen av teknologi, vil ikke denne typen enheter forlate markedet for måleenheter i overskuelig fremtid, fordi driften er basert på fysikkens grunnleggende lover.
Lignende artikler: